BIOGRAFÍA:
Daniel Bejarano Segura, nació el 15 de septiembre de 1976 en la ciudad de Arauca, en el departamento de Arauca, bautizado en el municipio de San Juan de Arama en el departamento del Meta. Hijo de Juan Agustín “quién murió en 1982” y Sol Marina Segura Acuña quien tuvo que criarlos sola “cuatro hijos” radicados en la ciudad de Villavicencio, en el Barrio La Esperanza; realiza sus estudios de primaria en la concentración Fidel Agusto Rivera y a sus doce años entra al INEM “Luís López de Mesa” graduado en la promoción de 1993 en la modalidad Agropecuaria, en 1994 presta su servicio Militar Obligatorio obteniendo su libreta de primera clase, entra a la Universidad de los Llanos Orientales a la Licenciatura en Matemáticas y Física, donde se destacó por sus buenas calificaciones que le otorgaron Matrícula de Honor, siendo eximido de los derechos de grado, en el año 2000, en ese mismo año contrae matrimonio con Darkis Nelle Pérez Silva quien es Licenciada en Básica Con énfasis en Educación Artística, Viajan a la ciudad de Mitú en el departamento del Vaupés, donde son nombrados en propiedad en la Escuela Normal Superior Indígena Maria Reina “ENOSIMAR” Allí realiza trabajos de investigación desde las ciencias naturales “Física” “FENÓMENOS Y CREENCIAS NATIVAS 2002-2005” “CONCEPCIONES ETNICAS Y CIENTÍFICOS NATURALES 2004-2005” y la Etnomatemática “PENSANDO MATEMÁTICAMENTE DESDE NUESTRA CULTURA 2002-2006” reconocidos por el Ministerio de Educación Nacional quien los hizo partícipes del Foro Educativo Nacional en el 2003 por sus diversas experiencias significativas en el aula. Co-Autor del Libro “DIVERSIDAD CULTURAL EN LA FORMACIÓN DE MAESTROS, Universidad Pedagógica Nacional, Bogotá 2006 ediciones Géminis Ltda.” Capacitador de propuestas pedagógicas para la enseñanza-aprendizaje de las matemáticas “PENSAMIENTOS Y ESTRAGEGIAS EN EL ÁREA DE LAS MATEMÁTICAS” desde 2003 hasta el 2006. Reconocido por el departamento del Vaupés por sus innovaciones pedagógicas y administrativas, ese mismo año empieza a investigar sobre lo que hoy se denomina el Método DABEJA, en Junio del 2006 es trasladado de la ciudad de Mitú al Municipio de Vista Hermosa en la vereda de Piñalito en el departamento del Meta “antigua zona de distensión” y actualmente labora en la Institución Educativa IRACÁ Donde ha formado un semillero de investigación con estudiantes de grado décimo. Invitado al primer foro educativo municipal en Chía (Cundinamarca), luego representa al departamento del Meta en el Foro Educativo Nacional con el Método DABEJA, su investigación ha sido reconocida por las principales Universidades del País quienes lo han invitado a sus eventos en matemáticas como conferencista “XVIII ENCUENTRO DE GEOMETRÍA Y SUS APLICACIONES Y VI ENCUENTRO DE ARITMÉTICA BOGOTÁ,” “8º ENCUENTRO DE MATEMATICA EDUCATIVA, SANTIAGO DE CALI” XVI CONGRESO NACIONAL DE MATEMÁTICAS MEDELLÍN” entre otros , hoy en día continúa estudiando el comportamiento de figuras geométricas tratando de encontrar otras relaciones, que permitan comprobar la eficacia del método para cualquier figura plana y tridimensional.
CAPÍTULO 1.
FIGURAS GEOMETRICAS I
FIGURAS GEOMETRICAS I
1.1 POLIGONOS REGULARES:

1.1.1 Conceptos:
Figura plana cerrada constituida por n puntos (vértices) de los que en ningún caso pueden encontrarse alineados tres consecutivos (formando línea de 180º) y por n segmentos rectilíneos que unen entre sí a los vértices. “diccionario enciclopédico color. 2001” Todo polígono regular de n-lados tiene n-puntos coordenados y ordenados, P1(X1, Y1) P2(X2, Y2), P3(X3, Y3), P4(X4, Y4), P5(X5, Y5), Pn-2(Xn-2, Yn-2). Pn-1(Xn-1, Yn-1), Pn(Xn, Yn). Los cuales surgen por:
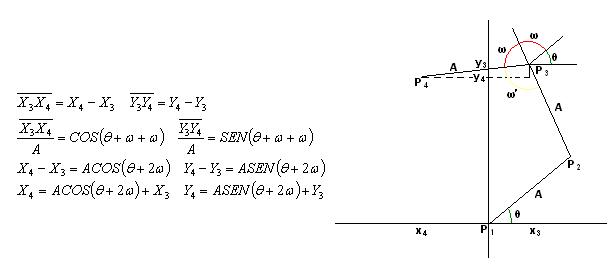
Yn = LSen (θ+ k ω) + Yn-1
Con LЄ R+, 0 ≤ θ ≤ 360º respecto a la horizontal K=n-2, n= puntos coordenados ω= (360/i), i= al número de lados. Donde L es el valor del lado que usted asigna y es cualquier número real, θ es el ángulo de rotación respecto de la horizontal, “asignado por usted” ω es el ángulo suplementario o externo y depende del número de lados del polígono, Xn y Yn “abscisas y ordenadas” puntos coordenados que generan los polígonos, Xn-1 y Yn-1 punto anterior respecto de Xn y Yn. “método DABEJA 2006”
1.1.2 Fórmulas método DABEJA para polígonos regulares y generalización.
Estas fórmulas contienen variables conocidas en cursos de trigonometría, como las funciones seno y coseno, ángulos de rotación “θ “, suplementarios “ω” e internos “ω´” puntos coordenados Pn= (xn, yn) cuyas componentes tiene valores reales positivos localizados en el plano cartesiano, el valor del lado del polígono regular “L”. Interactuando entre ellas para encontrar los puntos coordenados y ordenados que construyen la figura según sus lados.